Introduction
Coco builds and operates a fleet of last-mile delivery robots that operate on sidewalks. Coco is currently focused on food delivery, bringing restaurant meals to customers’ homes with best-in-class delivery, reliability, and cost. By replacing couriers in cars, Coco’s robot delivery also cuts greenhouse gas emissions and reduces congestion on city streets. Coco was interested in evaluating various control system architectures and braking options for their robot fleet. Second Order Effects was asked to evaluate tradeoffs in electrical systems of the robotic vehicle’s drivetrain with this in mind. SOE partnered closely with the Coco engineering team to deliver a system architecture design and electrical schematics for a Mobility Control System (MCS) and a trade study for an electronic braking system, all within one month.
Mobility Control System
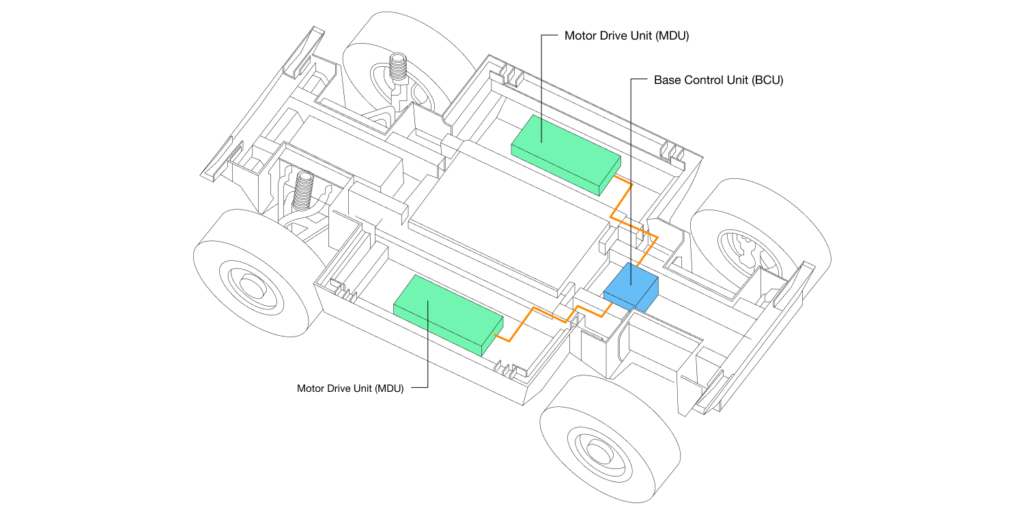
The mobility control system that SOE recommended consists of three subsystems: a Base Control Unit (BCU) and two identical Motor Drive Units (MDUs). The BCU acts as the interface between the Central Computer System and the MDUs, providing control signals for power and positioning to each of the MDUs. The Motor Drive Units (MDUs) then interpret these signals to direct the movement of the vehicle. SOE determined that a distributed architecture of two MDUs and one BCU would be optimal for Coco’s application based on enhanced modularity, reduced computational load for the microcontrollers, avoidance of EMI issues, and flexible packaging options.
Electronic Braking Trade Study
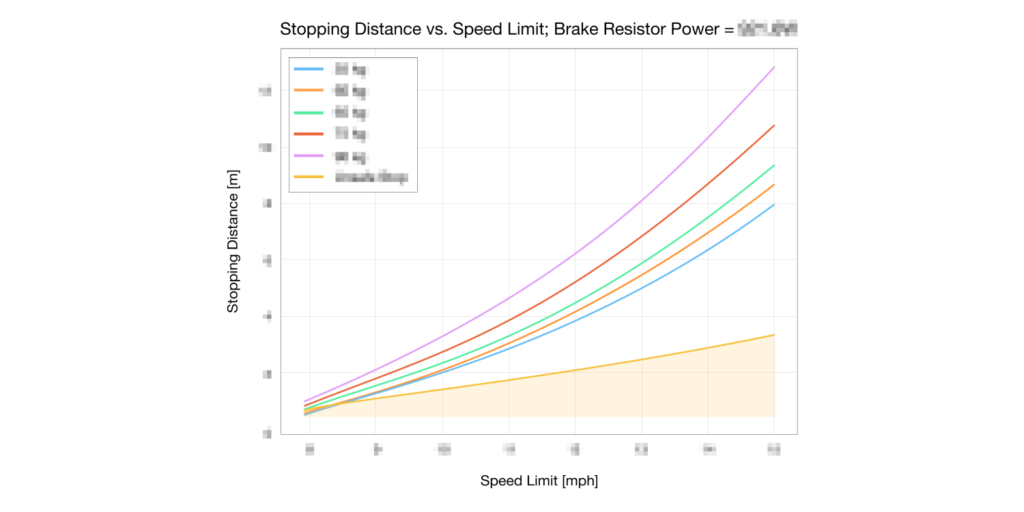
SOE evaluated various electronic braking methods to avoid the need for mechanically complex, heavy, and expensive disc brakes. SOE designed a time-step simulation that modeled the physics of braking responses under various vehicle parameters (e.g. mass, max speed, torque, etc) for dynamic braking, resistive braking, and other methods. The analysis demonstrated that electronic braking is feasible within Coco’s operating envelope, and enabled a detailed design of a hybrid regenerative/resistive electronic braking system.